- Dettagli
- Scritto da Gianni Bertozzi

Bertoldi Sergio
IL PLOTTER

Questo progetto nasce dall’idea di rimettere in funzione un plotter danneggiato, sostituendo la scheda di controllo presente all’interno, con la scheda programmabile Arduino UNO, con la quale vengono gestiti i due motori passo-passo e l’ elettromagnete presenti all’interno della macchina. I motori comandano il movimento della penna lungo il foglio e del foglio stesso, secondo le coordinate X e Y, mentre l’elettromagnete permette di alzare ed abbassare la penna.
L’interfaccia fra scheda Arduino UNO e Plotter è realizzata tramite due circuiti integrati Motorola ULN2803: quest’ultimo lavora in logica positiva e, comandato dalla scheda Arduino, è in grado di fornire in uscita l’alimentazione necessaria ai motori e all’elettromagnete.
Il codice scritto in linguaggio C implementa l’algoritmo di Bresenham (utilizzato per la rasterizzazione di linee), permettendo di convertire le coordinate X Y in istruzioni per il pilotaggio dei motori.
Per ottenere le coordinate necessarie alla scheda, viene utilizzato un programma di grafica vettoriale “InkScape”, in grado di convertire l’immagine che si vuole far eseguire al plotter in coordinate.
Studente coinvolto, classe 5D, indirizzo Elettronica ed Elettrotecnica, articolazione Elettrotecnica: Bertoldi Sergio.
Video del progetto:
- Dettagli
- Scritto da Gianni Bertozzi

Bernardi Andrea
LA MANO ROBOTICA

Il progetto prevede la costruzione di una mano robotica e la gestione della stessa tramite la scheda a microcontrollore Arduino; quest’ultima funge da interfaccia fra mano robotica e PC sul quale gira il codice di gestione scritto in LabVIEW.
La mano robotica è stata disegnata interamente con AutoCAD e creata con la stampante 3D, il materiale utilizzato è l'ABS.
La gestione della mano robotica avviene in due modalità, denominate automatica e manuale e quindi sono previsti due codici LabVIEW differenti.
La modalità manuale necessita di un guanto con sensori resistivi di flessione che permettono di replicare la movimentazione delle dita dell’individuo che indossa il guanto medesimo: la mano robotica quindi deve replicare la movimentazione della mano reale.
La modalità automatica prevede l’esecuzione di una movimentazione predeterminata e impostata tramite il codice LabVIEW: nel nostro caso l’apertura e successiva richiusura delle dita.
Studente coinvolto, classe 5E, indirizzo Elettronica ed Elettrotecnica, articolazione Elettrotecnica: Bernardi Andrea
Video del progetto:
- Dettagli
- Scritto da Gianni Bertozzi
BRACCIO ROBOTICO E NASTRO TRASPORTATORE

Bonandin Andrea, Andreoli Riccardo, Gualtieri Salvatore
Il progetto nasce con l’idea di combinare meccanica, elettronica e informatica per costruire un automatismo in grado di implementare su scala ridotta un braccio robotico, impiegato in un processo produttivo industriale, nel quale vengono prelevati dei pezzi e collocati su un nastro trasportatore con una zona di lavoro, per poi essere ripresi e portati in un punto di consegna.
L’impianto è realizzato tramite i prodotti Fishertechnik, mentre il controllo è implementato tramite un sistema di acquisizione dati National Instruments cDAQ9174 modulare, nel quale sono stati inseriti quattro moduli, due per leggere gli ingressi digitali di stato e impulsivi (NI942 e NI9423) e due per gestire i motorini che presiedono le movimentazioni (NI9472 e NI9481). Il software di gestione è sviluppato in LabVIEW secondo il design pattern “state machine” che implementa un automa di Moore; sono eseguiti due VI contemporaneamente, uno per gestire il braccio robotico e l’altro per controllare il nastro trasportatore, i due VI scambiano informazioni tramite variabile globale.
Studenti coinvolti, classe 5D, indirizzo Elettronica ed Elettrotecnica, articolazione Elettrotecnica: Andreoli Riccardo, Bonandin Andrea, Gualtieri Salvatore
Video del progetto:
- Dettagli
- Scritto da Gianni Bertozzi
Premio "Giulia Maramotti"
Classi V A e V B Moda Professionale
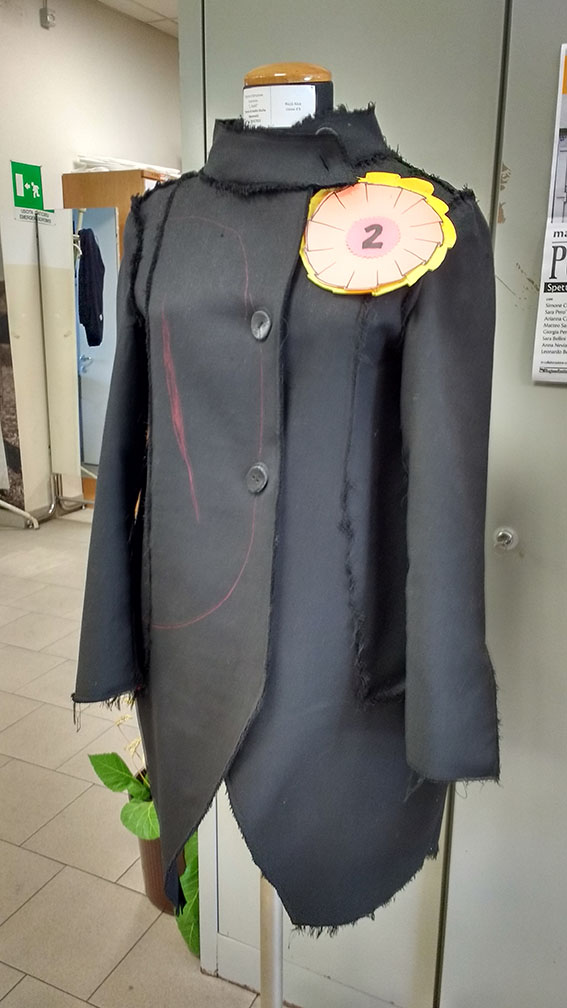
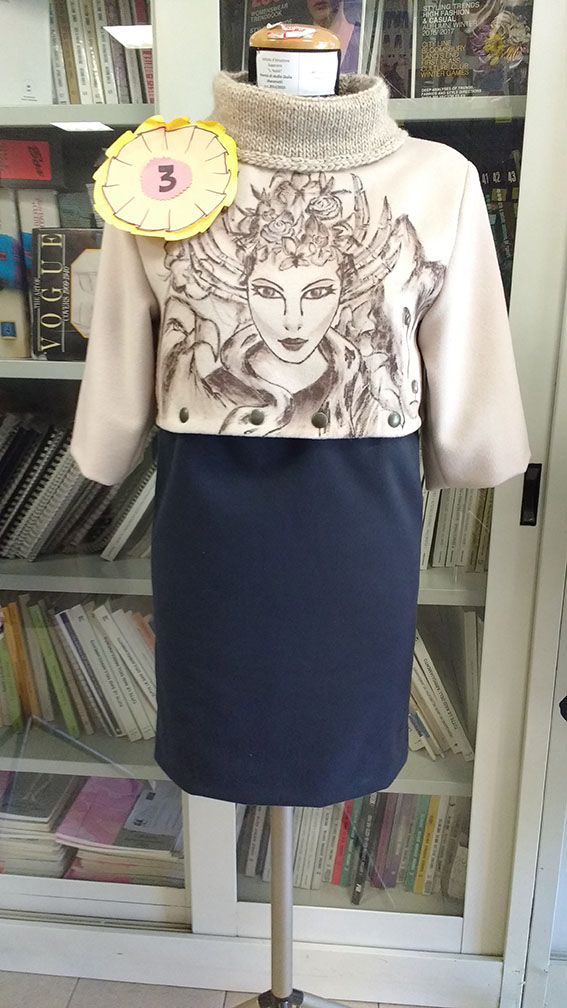
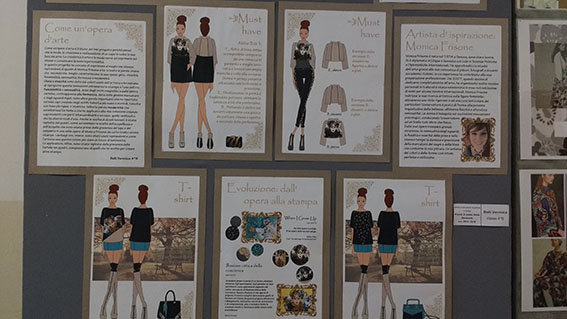
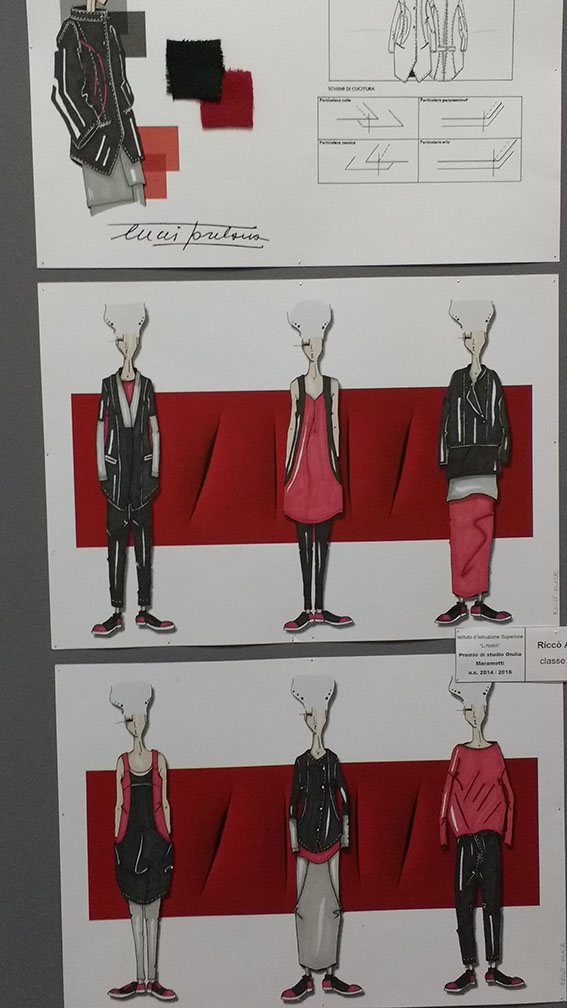
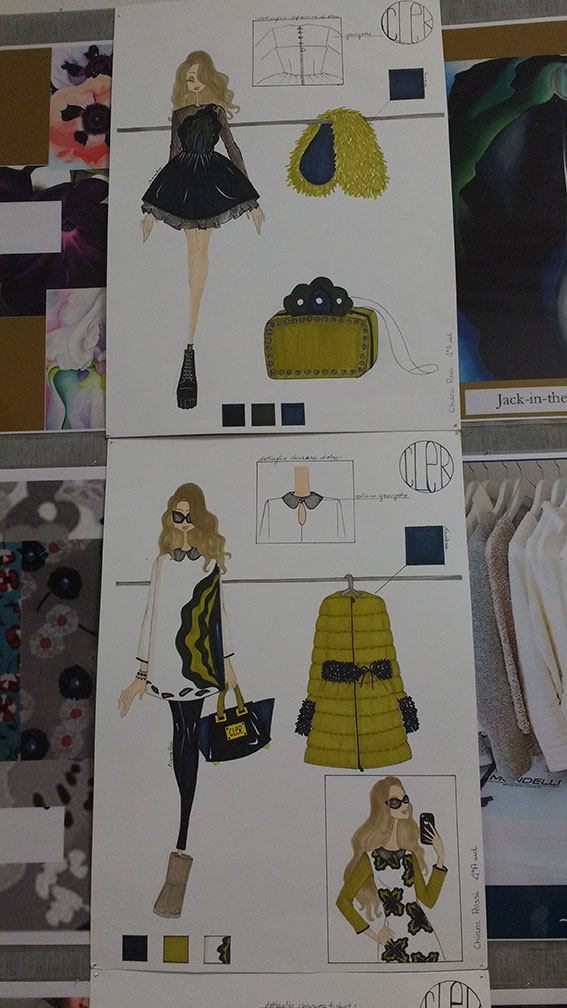
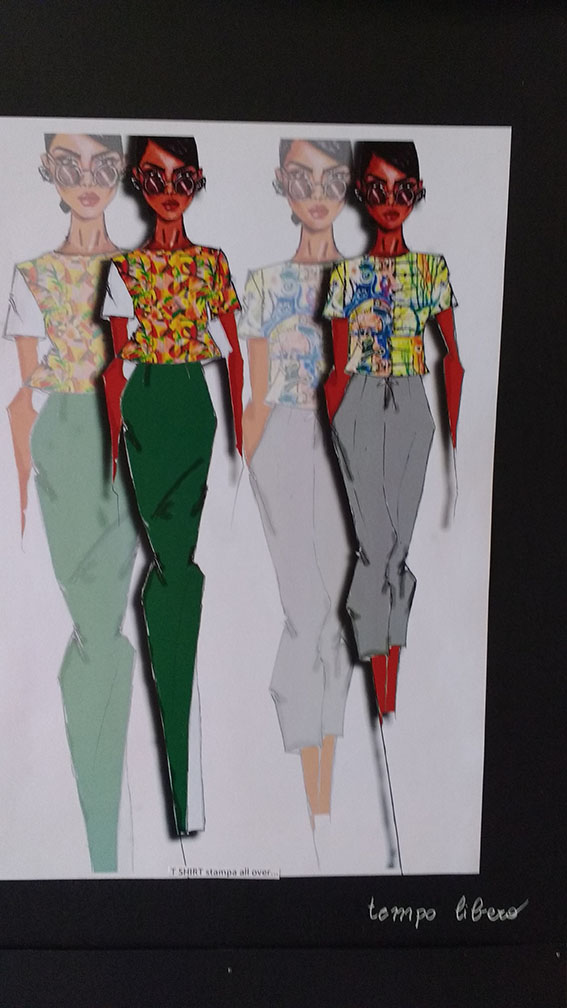
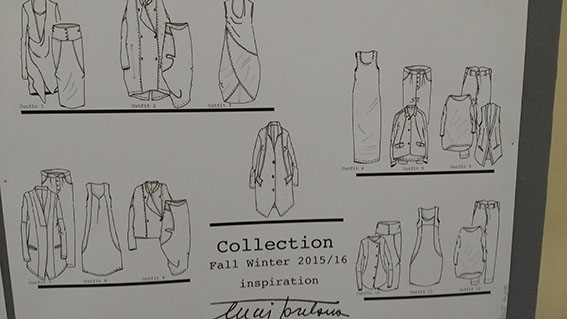
Storico progetto biennale, in collaborazione con Fondazione Giulia Maramotti e Soroptimist di RE, che gli allievi dell’indirizzo Moda Professionale iniziano nel quarto anno e concludono nel quinto a coronamento del percorso di studio. Il concorso prevede, per ogni allievo, l’ideazione di una collezione ispirata al tema proposto nel bando e la realizzazione completa di uno dei capi progettati; “Arte, moda e fantasia” era il tema assegnato nell’a. s. 2014/15. Ciascun allievo ha scelto un artista al quale riferire le proprie creazioni.
Tutto il percorso degli studenti è seguito da esperti di MAX-MARA che, in collaborazione con i docenti delle materie professionalizzanti, supportano e indirizzano l’ispirazione, le scelte e le fasi operative.
Il 30/04/16 nell’Aula Magna di UNIMORE, presso l’ex Caserma Zucchi, si è svolta la cerimonia di premiazione che prevede premi in denaro per i primi tre classificati e, per il vincitore, la possibilità di uno stage presso una delle aziende del gruppo MAX-MARA.
Link all'articolo di giornale:
http://www.ilrestodelcarlino.it/reggio-emilia/premio-maramotti-1.2111410
Foto dei capi che sono stati premiati e di alcuni figurini:




- Dettagli
- Scritto da Gianni Bertozzi
Progetto “OLIMPIADI DELLA DANZA”
Classi del Tecnico e del Professionale
Si chiamano Olimpiadi della Danza ed è una manifestazione organizzata dall’Associazione Fare Danza di Rovereto, direttore artistico Enkel Zhuti.
Si svolgono dal centro al nord Italia, su base provinciale e nazionale e coinvolgono le scuole superiori di primo e secondo grado.
Lo scopo principale è portare la danza e l’espressione artistica dei ragazzi nelle scuole. Ai linguaggi tradizionalmente usati dalla scuola, la danza arricchisce la personalità e la creatività degli studenti oltre a infondere in loro il rispetto delle regole della convivenza civile.
Anche il nostro istituto “L. Nobili” ha partecipato a tale evento svoltosi il 21 marzo 2016 al Pala Bigi di Reggio Emilia, riportando grandi soddisfazioni grazie alla bravura e la generosità dei nostri ragazzi provenienti sia dal tecnico che dal professionale dell’istituto.

Video:
Studenti partecipanti:
Andreotti Jennifer cl. 1 AMD (Professionale Moda)
Cesarini Giusy cl. 1 AMD (Professionale Moda)
Uhunamure Angel Osauguemwen cl. 1 AMD (Professionale Moda)
Pantisano Sara cl. 1 AMD (Professionale Moda)
Barone Martina cl. 1B MD (Professionale Moda)
Macrì Valentina cl. 1B MD (Professionale Moda)
D'Addio Serena cl. 1C MD (Professionale Moda)
Zafferri Arianna cl. 1C MD (Professionale Moda)
Reggiani Alessia cl. 1C MD (Professionale Moda)
Lombardo Veronica cl. 5A MD (Professionale Moda)
Varallo Erika cl. 5A MD (Professionale Moda)
Davì Cristian cl 1A MT (Professionale Manutenzione Tecnica)
Duscov Serghei cl. 1E MT (Professionale Manutenzione Tecnica)
Tortora Cristiano Joseph cl. 1B (Tecnico)
Izzo Aldo cl. 1C (Tecnico)
Terzi Denny cl. 5D (Tecnico)
Borghi Marcello cl. 5B (Tecnico)