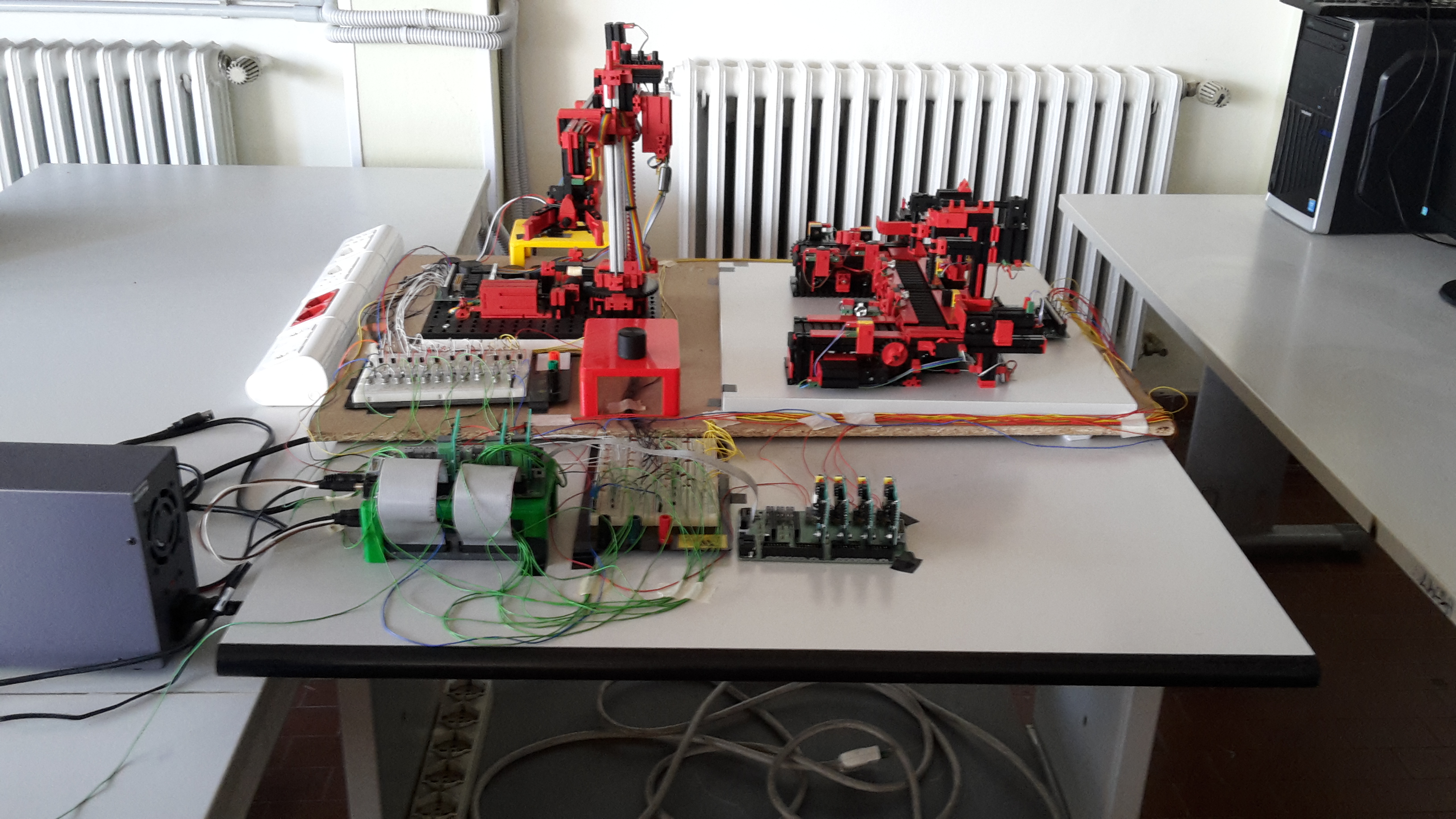
Il progetto d’esame consiste nel realizzare un sistema di controllo di un processo di lavorazione costituito da un robot manipolatore a 3 assi con pinza e da 4 nastri trasportatori con 2 stazioni di lavorazione, una per la fresatura e la seconda di foratura. L’impianto è realizzato tramite i prodotti Fishertechnik.
Il controllore utilizzato è costituito dalla scheda a microcontrollore programmabile NI myRIO prodotta da National Instruments e programmata tramite il linguaggio LabVIEW. Il software di gestione è sviluppato secondo il design pattern “state machine” che implementa un automa di Moore.
L’ Interfaccia d’ ingresso è realizzata tramite partitori di tensione, mentre in uscita la scheda NI myRIO pilota un driver a transistor e, per alcuni canali, la scheda commerciale My Conditioning.

Il sistema di controllo utilizza i seguenti canali:
18 canali di ingresso digitali, di cui 4 veloci (Encoder)
18 canali di uscita digitali
1 canale di ingresso analogico
Video:
Studenti coinvolti, classe 5E, indirizzo Elettronica ed Elettrotecnica, articolazione Automazione: Didier Beltrami, Alberto Fantini, Luca Zanella.